Projects
Physical Process-Informed Mapping
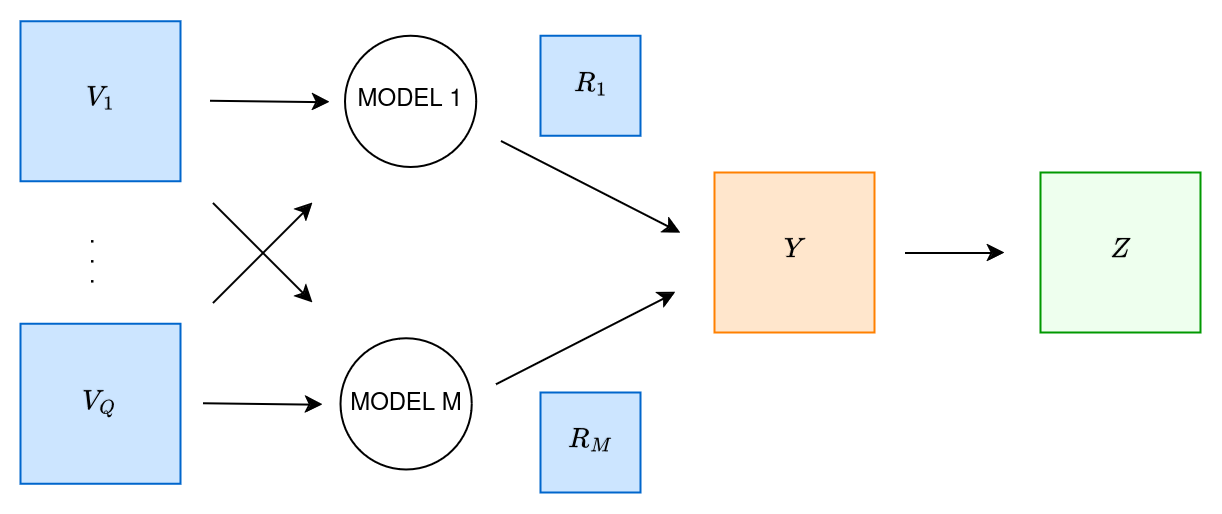
This project posits that integration of physical process models, such as equation-based representations of natural phenomena, can further improve the predictive capabilities of maps of natural phenomena. In addition, inclusion of such process models should enable analysis of the relevance of each model to such predictions, assisting with scientific investigations into these phenomena. This research investigates such improvements to large-scale mapping for mobile exploration robots and will make up my dissertation research.
Spectral Mixture Ergodic Search
This project pairs mapping methods that rely on spectral mixture kernels with ergodic search such that as a spatial distribution is learned via the former and used to generate trajectories via the latter. This pairing is made possible via the Fourier decompositions used by both methods, enabling the ergodic search algorithm to be adapted to use the frequencies found to be important for describing the distribution by the mapping method.
Lunar NeRFs
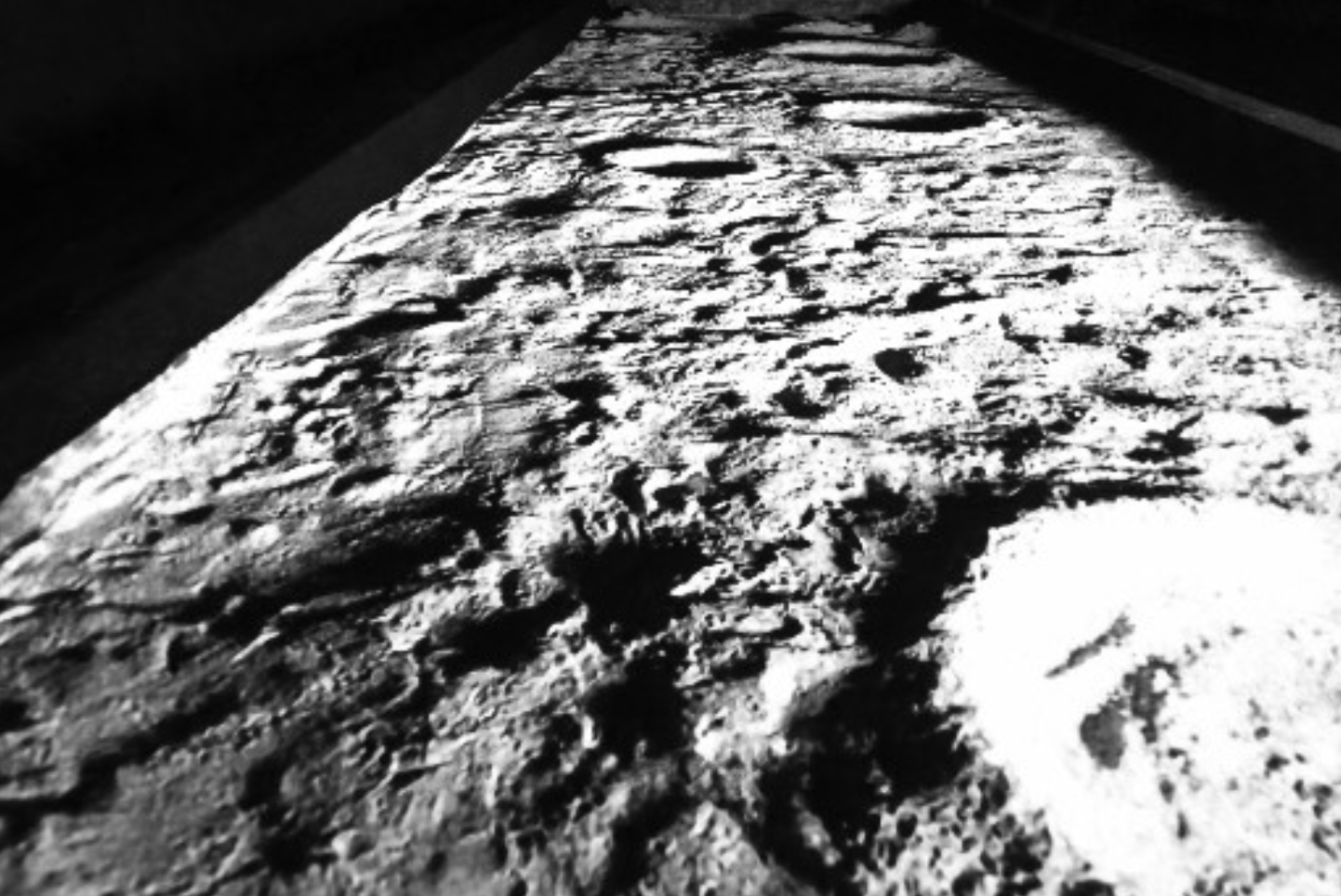
Neural radiance fields (NeRFs) are learned, neural representations of a density and color field that can be used to render novel views of a scene via volumetric rendering. Planetary robotics poses a challenge for such techniques due to the often extreme lighting conditions, lack of features in a scene, and limited motion of the image sensors, in addition to the problem of compute. This project seeks to assess the practicability of using NeRFs for modeling lunar terrain, with a focus on geometric aspects in addition to photometric.
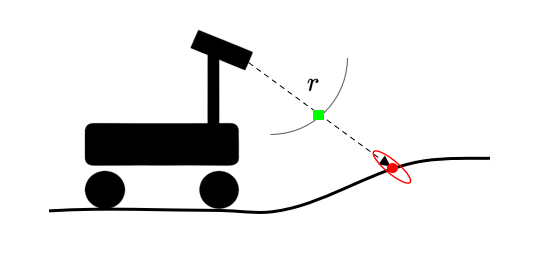
Range-based GP Maps
This project represents range measurements from a Velodyne LiDAR scanner using Gaussian process regression to model the surrounding environment in a sensor-centric frame based on the angles used to take a range measurement. The goal of doing so is to represent 3D features - such as caves, vertical walls, and overhangs - in a way that incorporates spatial correlation, produces uncertainty predictions, and is continuous. Initial results were presented at IROS 2023.
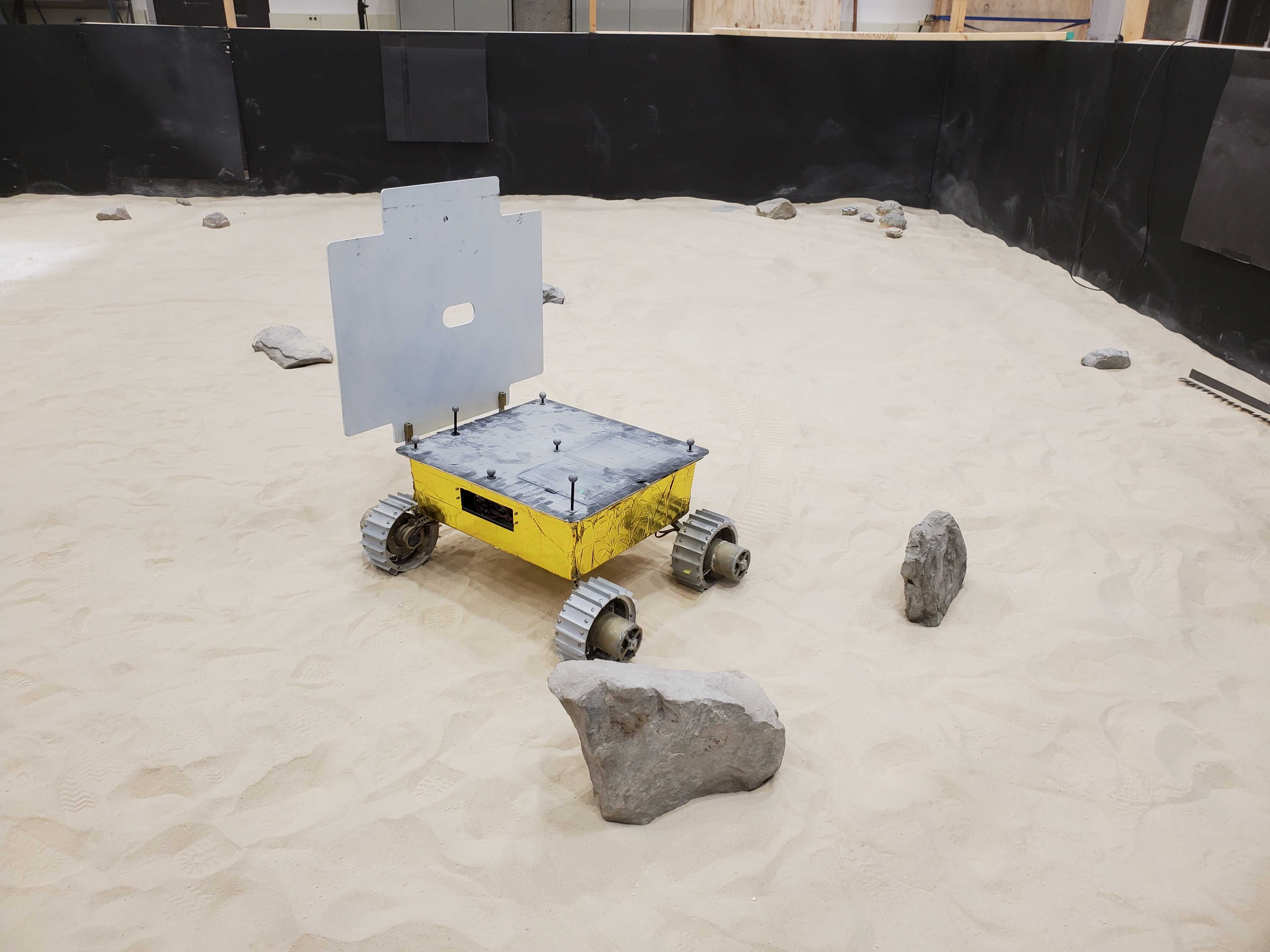
MoonRanger
A microrover designed by Astrobotic and CMU to search for water ice at the south pole of the moon. As part of this project, I designed, authored, and tested the mapping component of the flight software, in addition to being an active participant in integrated testing of the autonomous navigation software on a prototype rover.