Range-based GP Maps
This project represents range measurements from a Velodyne LiDAR scanner using Gaussian process regression to model the surrounding environment in a sensor-centric frame based on the angles used to take a range measurement. The goal of doing so is to represent 3D features - such as caves, vertical walls, and overhangs - in a way that incorporates spatial correlation, produces uncertainty predictions, and is continuous. GPs lend themselves to this application well but must be used to model the correct value (range).
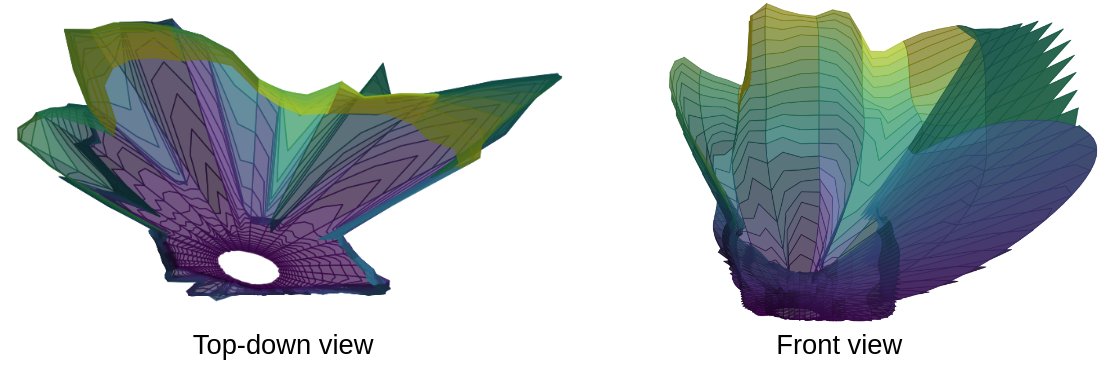
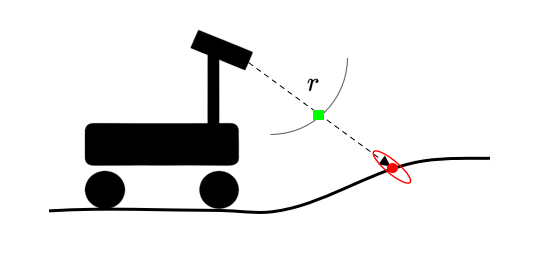
GP regression is typically only applied to elevation, especially in the context of planetary rovers. Elevation-based models work well for orbital images, since the sensor noise is well aligned with the terrain height. However, for a ground-based rover, perception sensors will record data at an oblique angle to the terrain, meaning the sensor uncertainty also has components in the x and y directions. Range-based Gaussian process maps model range measurements directly as a function of the inclination and azimuth of the ray along which an observation was taken, enabling correct modeling of uncertainty along with incorporation of spatial correlations. Work has thus far focused on local mapping over simulated cratered terrain and for subterranean data (example below).
Paper: M. Hansen and D. Wettergreen, “Range-based GP Maps: Local Surface Mapping for Mobile Robots using Gaussian Process Regression in Range Space,” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 2023, pp. 7241-7248, doi: 10.1109/IROS55552.2023.10341949.